DUILIO F4
Una scheda di controllo per muovere e coordinare più motori con sicurezza in caso di perdita di connessione.
Tre ruoli per macchine, robot e sistemi modulari

Controller di movimento standalone
Gestisci il movimento multi-asse con coordinamento e sicurezza.
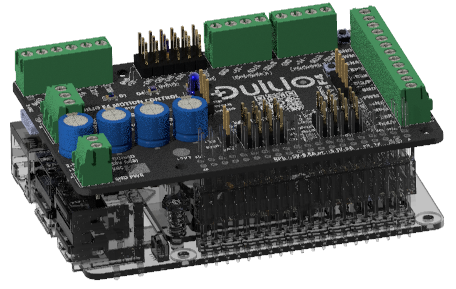
Raspberry Pi HAT
Puoi abbinarla ad un computer host per il controllo di alto livello.

Nodo di espansione bus
Estende più schede su bus RS485.
Caratteristiche principali
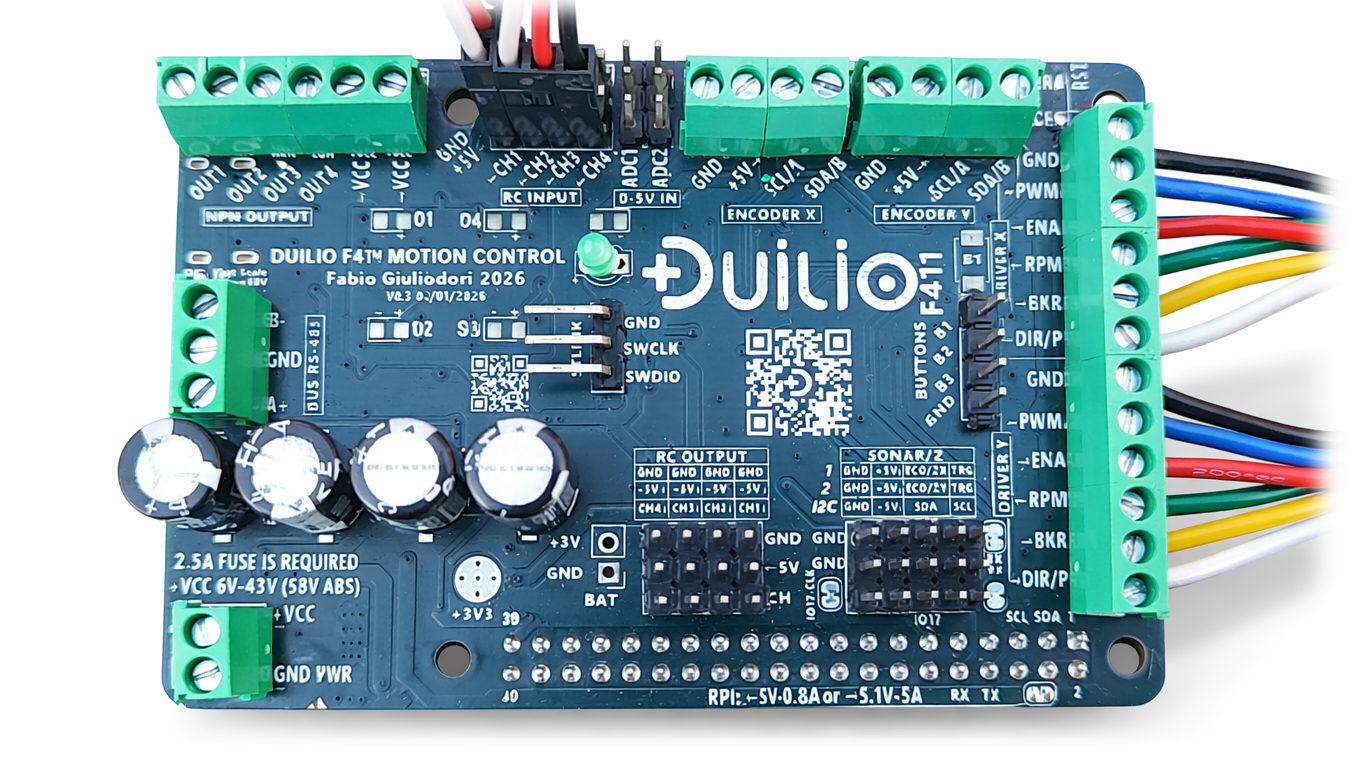
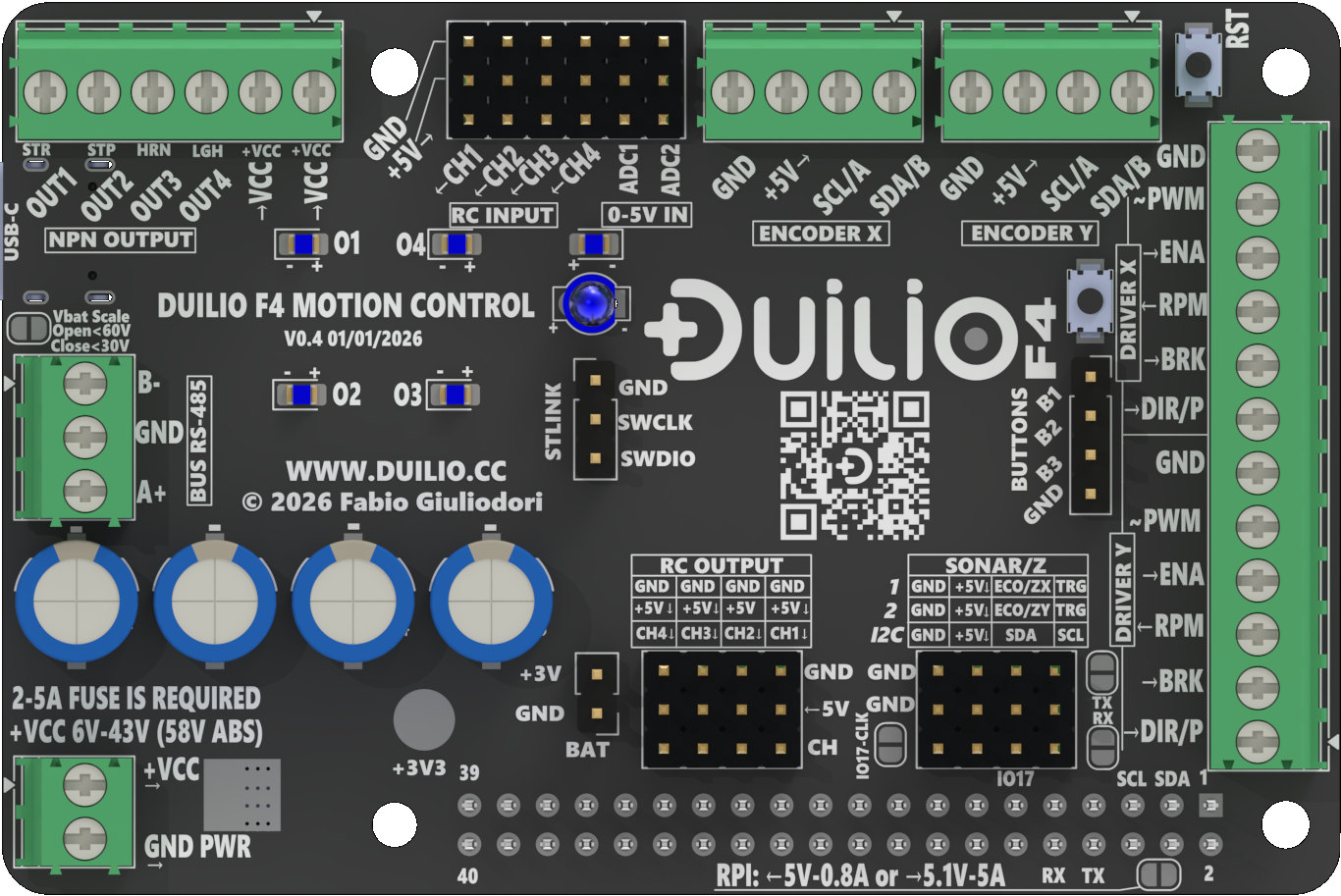
DUILIO F4 - Caratteristiche principali
Questa pagina fornisce una panoramica tecnica strutturata di DUILIO F4, includendo le capacità di controllo del movimento STM32, i comportamenti di sicurezza e failsafe, I/O e le interfacce driver motore supportate per robotica e macchine.
La documentazione del progetto è disponibile su GitHub.
Controllo del movimento e sicurezza
I/O e interfacce
Architettura di sistema
DUILIO F4 usa un'architettura distribuita con una chiara separazione tra la logica host e il controllo del movimento in tempo reale. L'host gestisce UI, networking e coordinamento mentre i nodi Duilio eseguono i compiti critici nel tempo. Il sistema scala su RS485, permettendo più schede Duilio sullo stesso bus.
| Sezione | Dettagli |
|---|---|
| MCU |
|
| Controllo movimento |
|
| Scalabilita |
|
| Driver motore |
|
| Encoder e feedback |
|
| RC I/O |
|
| I/O digitali (potenza) |
|
| I/O digitali (logica) |
|
| Ingressi analogici |
|
| Sensori |
|
| Sicurezza e failsafe |
|
| Configurazione |
|
| Sistemi host |
|
| Power |
|
| Uscita alimentazione Raspberry Pi |
|
| Protezione |
|
| Filosofia di sistema |
|
Compatibilità driver motore
DUILIO F4 funziona con molti driver motore esterni. La compatibilità dipende dall'interfaccia di controllo usata dal driver motore, mentre DUILIO gestisce logica di movimento e coordinamento.
Interfacce di controllo supportate
- PWM + DIR (5 V)
- ENABLE + DIR + PWM (5 V)
- Dual PWM (forward / reverse)
- STEP / DIR (profili velocità o posizione)
- Velocità analogica (0-5 V)
- Velocità analogica + direzione (0-5 V)
- RC-style PWM (ESC / servo)
Famiglie di driver motore comunemente usate
Esempi solo come riferimento, non supporto ufficiale:
- ZS-X11 series
- BLD-300 / BLD-510
- BTS7960 (IBT-2 modules)
- ODrive
- VESC
- Industrial and industrial-light drives such as Nanotec, Leadshine, Oriental Motor, Trinamic, Delta Electronics, Omron, SINAMICS, Maxon, Bosch Rexroth, Parker, Lexium, Panasonic
La compatibilità specifica dipende dal cablaggio e dal profilo firmware. Alcuni driver sono già usati in applicazioni reali, altri sono in valutazione.
Confronto / Posizionamento
Dai controller ai cuori dei sistemi di motion control
La maggior parte dei controller e progettata per eseguire codice.
DUILIO F4 e progettato per far funzionare macchine.
Questo confronto evidenzia differenze architetturali, non le prestazioni pure.
| Controller | Compatibilità logica 5V | Ingressi analogici ad alta risoluzione | Logica failsafe dedicata | Coordinamento multi-motore | Ampio range di tensione in ingresso | Può alimentare periferiche (es. Raspberry Pi) | Funziona con driver motore esterni | Watchdog di sistema e stati di sicurezza | Tempo per un sistema di movimento funzionante | Efficienza dei costi (tipica) |
|---|---|---|---|---|---|---|---|---|---|---|
| Arduino UNO / MKR | ||||||||||
| Arduino GIGA R1 | ||||||||||
| ESP32 | ||||||||||
| STM32 Nucleo | ||||||||||
| DUILIO F4 |
Nota: i punteggi riflettono l'uso tipico a livello di sistema, non le capacità pure della MCU. Le schede generaliste possono richiedere hardware e firmware extra per raggiungere caratteristiche simili di sicurezza e movimento.
Perché esiste
La storia dietro DuilioF4
DuilioF4 nasce per garantire affidabilità, sicurezza ed espandibilità al sistema di guida remota DuilioFPV.
DuilioFPV è nato con un obiettivo chiaro: permettere a una persona di guidare, dal proprio PC, un veicolo reale nel mondo fisico, attraverso una connessione video e comandi in tempo reale.
Durante lo sviluppo è emerso rapidamente un punto critico: quando si lavora su macchine vere, motori e driver non sono il problema principale. La parte più delicata è la logica di movimento.
Ogni veicolo richiede rampe corrette, limiti sicuri, coordinamento tra i comandi, gestione degli errori e un comportamento prevedibile in caso di perdita del segnale o anomalie.
Per questo è nato DuilioF4: un controller di movimento dedicato, progettato per rendere il sistema più stabile, modulare e scalabile.
Non un semplice componente elettronico, ma il cuore operativo che permette a DuilioFPV di passare dal prototipo a una piattaforma reale, affidabile ed espandibile.
— Fabio Giuliodori
FAQ
Serve DUILIO F4 per iniziare con DUILIO FPV?
No. Puoi iniziare con DUILIO FPV. DUILIO F4 diventa utile quando servono più sicurezza e funzioni avanzate.
Cosa aggiunge DUILIO F4 a un sistema di guida remota?
Aggiunge controllo del movimento deterministico, logiche failsafe integrate, I/O più ricco e maggiore affidabilità su macchine reali.
Funziona con driver motore esterni?
Sì. DUILIO F4 supporta molte famiglie di driver motore e diverse interfacce di controllo.
Continua a esplorare
Ultimo aggiornamento: 18 gennaio 2026